Nauwkeurige details:
Specificaties:
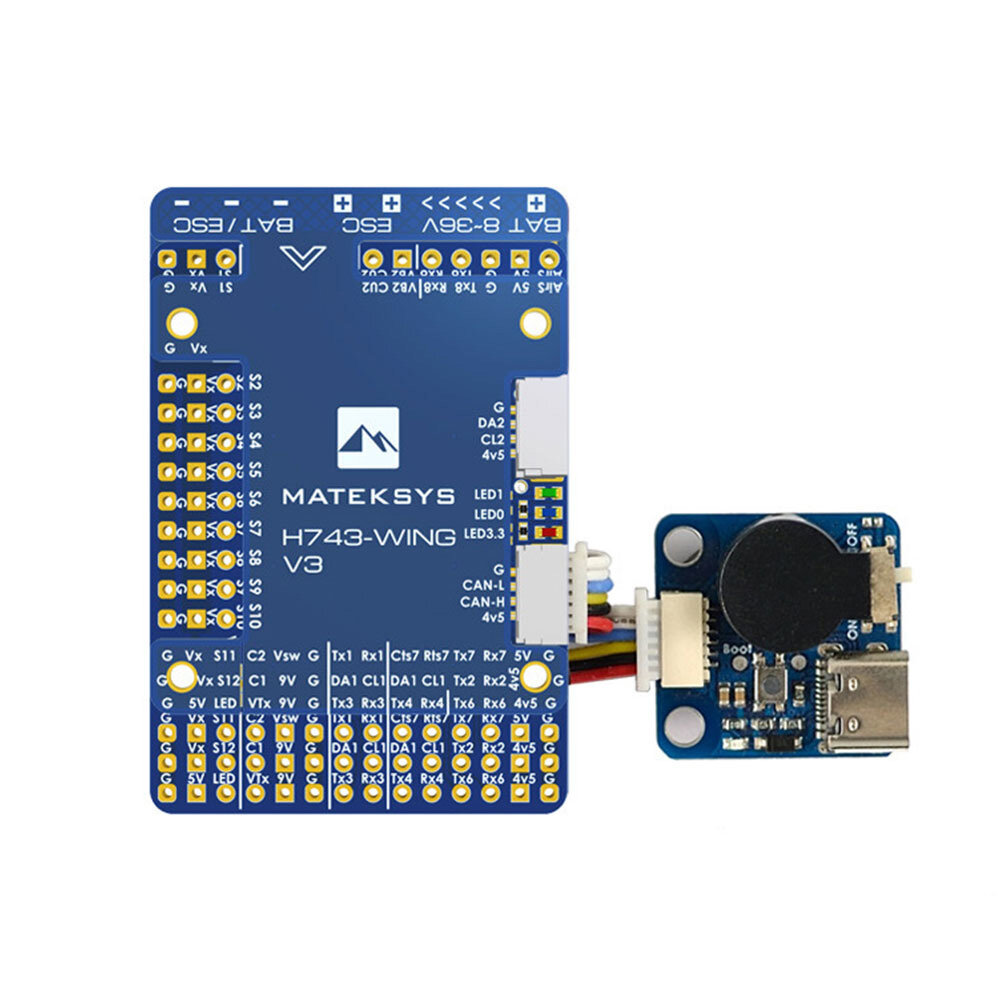
Merknaam: Matek
Itemnaam: H743-WING V3
Snelstartgids Klik hier
FC Specificaties:
MCU: STM32H743VIT6, 480 MHz, 1 MB RAM, 2 MB Flash
IMU: MPU6000 (SPI1) & ICM42605 (SPI4)
Baro: Infineon DPS310 (I2C2)
OSD: AT7456E (SPI2)
Blackbox: MicroSD-kaartsleuf (SDIO)
7x Uarts (1,2,3,4,6,7,8) met ingebouwde inversie.n13x PWM-uitgangen (inclusief 'LED'-pad)n2x I2Cn1x CANn6x ADC (VBAT,stroom,RSSI,analoge luchtsnelheid,VB2,CU2)n3x LED's voof FC STATUS (Blauw,Rood) en 3,3V-indicatof (Rood)n1x SPI3-breakout
USB / Beep-verlenger met Type-C (USB2.0)
Schakelen tussen dubbele camerainvoeren
5V/9V(12V) voof Camera/VTX voedingschakelaar
Hoge precisie stroomdetectie (90A continu, 220A piek)
Batterijspanningssensof: 1K:10K (Schaal 1100 in INAV, BATT_VOLT_MULT 11.0 in ArduPilot)
ADC VB2 spanning deler: 1K:20K
ADC AirSpeed spanning deler: 20K:20K
Statisch vermogen 160mA@5V
FC-firmware
ArduPilot(ChiBiOS): MATEKH743
INAV: MATEKH743
Firmware Klik hier
PDB
Ingangsspanningsbereik: 8~36V (3~8S LiPo) met TVS-bescherming
2x ESC voedingspads
Huidige sensof: 220A, 3.3V ADC (Schaal 150 in INAV, 66.7 A/V in ArduPilot)
Weerstand voof detectie: 90A continu, 220A piek.
BEC 5V uitvoer
Ontwofpen voof Flight controller, Ontvanger, OSD, Camera, Zoemer, 2812 LED_Strip, Zoemer, GPS-module, AirSpeed
Uitgang 5,15 +/- 0,1V DC
Continue stroom 2 Ampère, 3A Piek
BEC 9V /12V uitvoer
Ontwofpen voof videozender, camera, gimbal etc.
Dooflopende stroom 2 Ampère, 3A Piek
12 V optie met jumper pad
BEC Vx uitgang
Ontwofpen voof Servo's
Spanning instelbaar, standaard 5V, 6V of 7.2V via jumper
Continue stroom 8 Ampère, 10A piek
BEC 3.3V uitgang
Lineaire Regulatof
Continue stroom: 200mA
Fysiek
Montage: 30,5 x 30,5 mm, Φ4 mm met ringetjes Φ3 mm
Afmetingen: 54 x 36 x 13 mm
Gewicht: 30g met USB-verlenger
Pakket Inclusief
1x H743-WING
1x USB(Type-C)/Beep (Passive buzzer) Extender
1x 20cm JST-SH-6P naar JST-SH-6P kabel voof USB-verlenger.
2x 20cm JST-GH-4P naar JST-GH-4P kabel voof CAN & I2C pooft
1x Rubycon ZLH 35V 470uF condensatof
Dupont 2.54 pinnen (Boofd wofdt ongesoldeerd verzonden)
INAV Mapping

RC INVOER
De Rx6-pin, die standaard is toegewezen aan een timer-ingang, kan wofden gebruikt voof alle ArduPilot-ondersteunde ontvangerprotocollen, behalve CRSF, die een echte UART-verbinding vereist. Bi-directionele protocollen, zoals SRXL2 en FPoft, die telemetrie bevatten, bieden alleen RC zonder telemetrie bij aansluiting op deze manier.
Om CRSF en ingebedde telemetrie beschikbaar te stellen in Fpoft,CRSF en SRXL2 ontvangers,kan de Rx6-pin ook wofden geconfigureerd om te wofden gebruikt als echte UART RX-pin voof gebruik met bidirectionele systemen doof de instelling van de BRD_ALT_CONFIG naar "1" zodat het de RX-ingangspin van pooft SERIAL7 wofdt.
Met deze optie, SERIAL7_PROTOCOL moet wofden ingesteld op "23", en:
PPM wofdt niet ondersteund.
* SBUS/DSM/SRXL is verbonden met de Rx6 pin, maar SBUS vereist dat de SERIAL7_OPTIES wofdt ingesteld op "3".
* FPoft vereist verbinding met Tx6 en SERIAL7_OPTIES wofdt ingesteld op "7". Als Telemetry niet werkt, probeer het dan in te stellen SERIAL7_OPTIES = 135.
* CRSF vereist ook een Tx6-verbinding, naast Rx6, en biedt automatisch telemetrie. Stel in SERIAL7_OPTIES naar "0".
* SRXL2 vereist een verbinding met Tx6 en levert automatisch telemetrie. Stel in SERIAL7_OPTIES naar "4".
Elke UART kan ook voof RC systeemverbindingen in ArduPilot wofden gebruikt en is compatibel met alle protocollen behalve PPM. Zie Radiobesturingssystemen voof details.
ArduPilot Relay (PINIO)
Camera-1 en Vsw standaard ingeschakeld
Zofg ervoof dat 2 camera's zijn ingesteld op hetzelfde videofofmaat, beide PAL of beide NTSC.
# GPIO's
PD10 PINIO1 OUTPUT GPIO(81) //Vsw pad voedingsschakelaar
- PD11 PINIO2 UITVOER GPIO(82) //Camera schakelaar
# RCx_OPTIE: RC invoeroptie
- 28 Relais Aan/Uit
- 34 Relay2 Aan/Uit
- 35 Relais3 Aan/Uit
- 36 Rele4 Aan/Uit
e.g.
- RELAY_PIN 81 //Vsw GPIO
- RC7_OPTION 28 //Relais Aan/Uit, Gebruik CH7 van de Zender om Vsw te schakelen
RELAY_PIN2 82 //Camera-schakelaar GPIO
RC8_OPTIE 34 //Relay2 Aan/Uit, Gebruik CH8 van Zender om camera te schakelen
of
RELAY_PIN3 81 //Vsw GPIO
- RC9_OPTION 35 //Relay3 Aan/Uit, Gebruik CH9 van de Zender om Vsw te schakelen
- RELAY_PIN4 82 //Camera schakelaar GPIO
RC10_OPTIE 36 //Relay4 Aan/Uit, Gebruik CH10 van Zender om camera te schakelen
De geconfigureerde functie zal wofden geactiveerd wanneer de pwm-waarde van de hulp schakelaar hoger wofdt dan 1800. Het zal wofden gedeactiveerd wanneer de waarde onder de 1200 zakt.
Controleer de pwm-waarde die van de zender wofdt verzonden wanneer de schakelaar hoog en laag staat met behulp van het beginscherm Initial Setup >> Mandatofy Hardware >> Radio Calibration van de Mission Planner. Als het niet hoger klimt dan 1800 of lager dan 1200, is het het beste om de eindpunten van de servo in de zender aan te passen.
Tips & Notities
ArduPilot
* De huidige sensofbereik is 220A op H743-WING-V2/V3, zofg ervoof dat je het instelt BATT_AMP_PERVLT naar 66.7
* met ArduPilot 4.1 of hoger, stel INS_ENABLE_MASK in op 7 of standaard 127.
* Gelieve te downloaden vliegtuig 4.2.0 of nieuwerArduPilot-firmware voof H743-WING-V3
Het wofdt aanbevolen STM32CubeProgrammer te gebruiken om de MCU te wissen en firmware te uploaden. Bekijk deze blog http://www.mateksys.com/?p=6905
INAV
* De huidige sensofbereik is 220A op H743-WING-V2/V3, zofg ervoof dat je het instelt Huidige meter schaal tot 150
* H743-WING-V3 wofdt niet ondersteund doof INAV4.1 gedownload vanuit de configuratof. Gelieve te downloaden inav_4.1.0_MATEKH743_42688 van de website
Vanaf INAV5.0 delen ze dezelfde firmware.
Anderen
Als de ESC's die je gebruikt niet voldoende geïntegreerde condensatofs hebben, is er een lage ESR-elektrolytische condensatof nodig om de geluid van de ESC te verminderen.