Nauwkeurige details:
TIPS
1. INAV, DSHOT kan niet werken op S3, S5, S7 vanwege DMA-conflict, gebruik alstublieft ONESHOT of MULTISHOT en kalibreer de ESC PWM-bereik.
2. BetaFlight, zet dshot_bitbang = AAN wanneer je X6 en X8 DSHOT gebruikt.
3. BetaFlight, De doelnaam is hernoemd naar MatekF405TE_SD
4. ArduPilot, stel LOG_BACKEND_TYPE = 1 (Bestand) in voor SD-kaartlogboeken
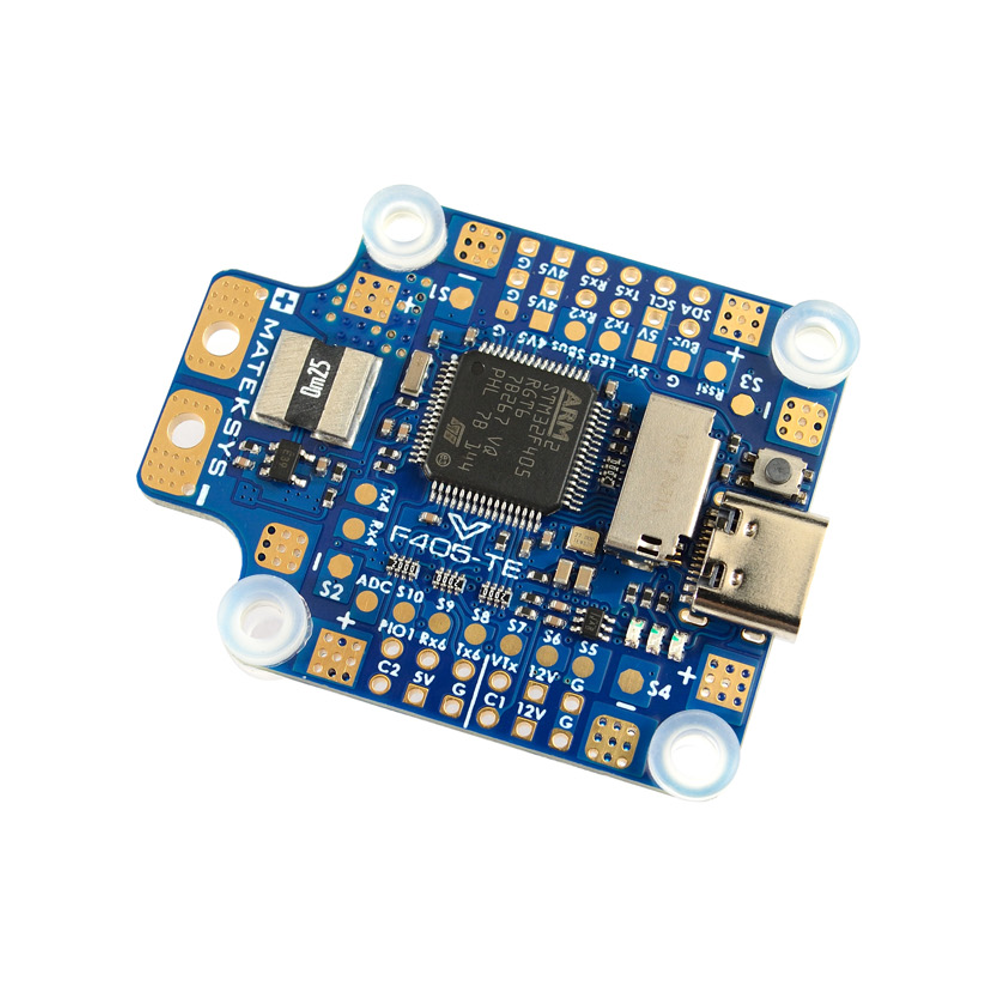
Specificaties
MCU: 168MHz STM32F405RGT6
IMU: ICM42688-P (SPI)
Baro: SPL06-001 (I2C)
OSD: AT7456E (SPI)
Blackbox: MicroSD-slot (SPI)
6x UART's, 1x Softserial_Tx optie (INAV/BF)
11x PWM-uitgangen (8x Dshot compatibel met BF/ArduPilot)
1x I2C
4x ADC (VBAT, Huidige, RSSI, Airspeed)
1x reserve PINIO
4x individuele ESC voedingssignaalpads
1x Groep van G/S1/S2/S3/S4 pads voor 4in1 ESC Signaal/GND
Ingebouwde omvormer op UART2-RX voor SBUS-ingang
Schakelbare Dubbele Camera-ingang
PDB Specificaties
9~36V (3~8S LiPo)
PDB: 4x 35A (Max.4x 50A)
BEC: 5V 1.5A
BEC: 12V 2A
LDO 3.3V: 200mA
Huidige voeler: 220A, 3.3V ADC (INAV/BF schaal 150, ArduPilot 66.7 A/V)
Batterijspanningsdeler 1K:20K (INAV-schaal 2100, BF-schaal 210, ArduPilot BATT_VOLT_MULT 21.0)
Firmware
ArduPilot: MatekF405-TE
INAV: MATEKF405TE_SD
BetaFlight: MATEKF405TE_SD
Fysiek
Montage: 30,5 x 30,5 mm, Φ4 mm met ringetjes Φ3 mm
Afmetingen: 36 x 46 mm
Gewicht: 10g
Inclusief
1x F405-TE
6x siliconen ringen M4 naar M3
1x Rubycon ZLH 35V/470uF (Lage ESR)
Layout & Bedrading

INAV/BF Mappen
ArduPilot Mapping
Frsky Smartport Telemetrie
non-omgekeerd (gehackt) S.Port-signaal
elke reserve Uart_TX
SERIALx_BAUD 57
SERIALx_OPTIONS 7
SERIALx_PROTOCOL 4 of 10 (voor yaapu)
DJI FPV OSD (ArduPilot 4.1)
https://ardupilot.org/plane/docs/common-msp-osd-overview.html
OSD_TYPE = 3
SERIAL4_PROTOCOL = 33
MSP_OPTIONS = 0 (pollingmodus)
Relais (PINIO)
PINIO1, PIO1-pad, standaard laag niveau
PINIO2, Camera switch, C1 standaard AAN
# GPIO's
PA4 PINIO1 OUTPUT GPIO(81) LAAG //PIO1-pad
PB5 PINIO2 UITGANG GPIO(82) LAAG //cameraschakelaar
# RCx_OPTIE: RC invoeroptie
28 Schakel Relais Aan/Uit
34 Relais2 Aan/Uit
35 Relay3 Aan/Uit
36 Rele4 Aan/Uit
e.g.
RELAY_PIN 81 //PIO1 GPIO
RC7_OPTIE 28 //Relais Aan/Uit, Gebruik CH7 van de Zender om PIO1 Laag/Hoog Level te regelen
RELAY_PIN2 82 //Camera-schakelaar GPIO
RC8_OPTIE 34 //Relay2 Aan/Uit, Gebruik CH8 van de Zender om het hoge/lage niveau op PB5 pad te regelen
De geconfigureerde functie wordt geactiveerd wanneer de pwm-waarde van de hulpkoppeling hoger wordt dan 1800. Het wordt gedeactiveerd wanneer de waarde onder de 1200 daalt.
Controleer de pwm-waarde die van de zender wordt ontvangen wanneer de schakelaar hoog en laag is met behulp van het Initial Setup >> Mandatory Hardware >> Radio Calibration scherm van de Mission Planner. Als deze niet hoger dan 1800 klimt of lager dan 1200 daalt, is het het beste om de eindpunten van de servo in de zender aan te passen.
TIPS
- F405-TE heeft INAV-fw voorgeïnstalleerd voor QC
- stel de PWM-snelheid van BLHeli32 ESC in op 48 kHz of hoger in BLHeliSuite
ArduPilot
ArduPilot fw,'Interne fouten 0x4000 l:213 spi_fail' waarschuwing,stel a.u.b. LOG_BACKEND_TYPE = 1 (Bestand) in voor SD-kaart logboeken.
Download ArduPilot firmware van HIER.
INAV
Met INAV-firmware kan DSHOT niet werken op S3, S5, S7 vanwege DMA-conflict. Gebruik alstublieft ONESHOT of MULTISHOT en kalibreer het ESC PWM-bereik.
Download INAV firmware 4.1.x van de Matck-website. INAV5.x of nieuwer rechtstreeks vanuit de INAV-configurator
BetaFlight
Als u een 5V passieve zoemer gebruikt, typt u 'set beeper_frequency = 2500' in de CLI.
MATEKF405TE_SD-doelwit werd ondersteund sinds BF4.4.
zet dshot_bitbang aan bij gebruik van X6 en X8 DSHOT
U kunt BF 4.3 rechtstreeks downloaden vanuit de BF-configurator, BF 4.2.x vanuit Hier.
Barometer SPL06-001 wordt niet ondersteund door Betaflight.