Nauwkeurige details:
Kenmerken:
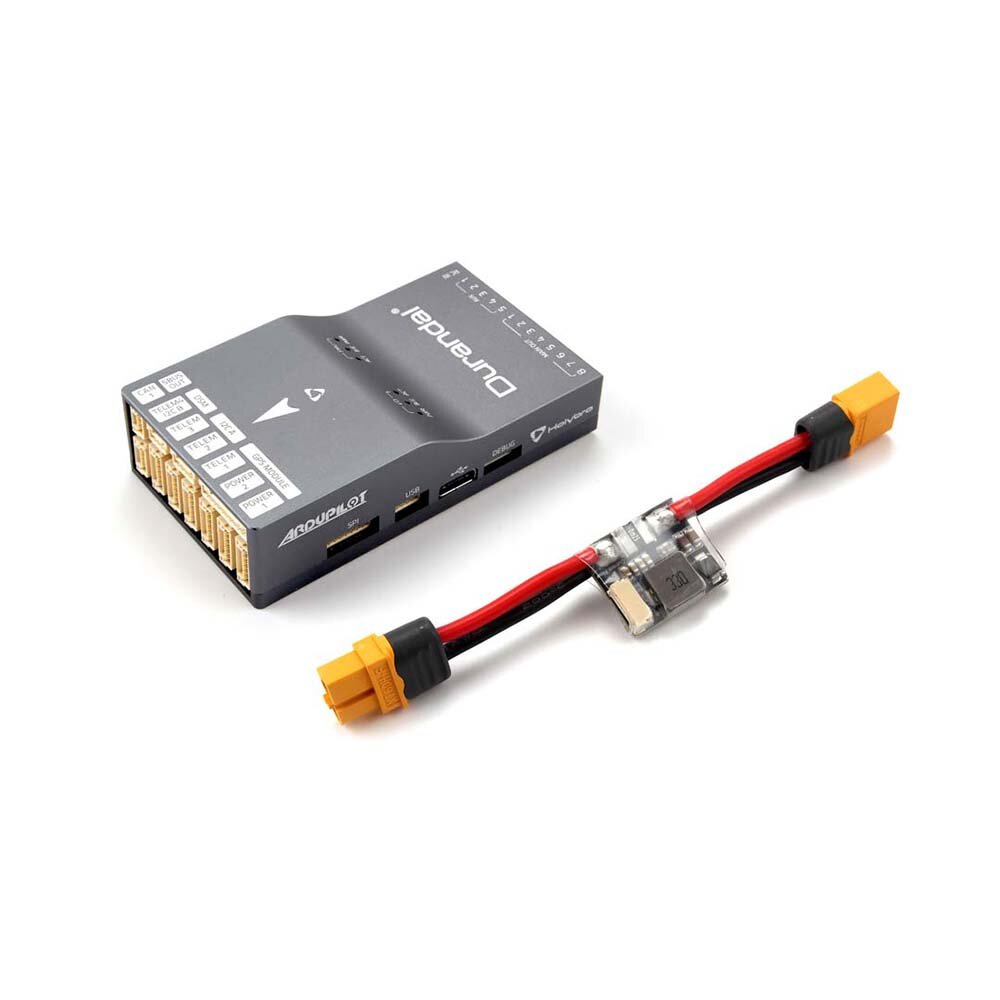
Durandal is een nieuwe vluchtcontroller ontworpen door Holybro, waarbij gebruik wordt gemaakt van de microcontroller-serie STM32H7. Naarmate het aantal dronebedrijven en -ontwikkelaars toeneemt en er steeds krachtigere modellen en meer ingebedde geheugencapaciteit nodig zijn, is Durandal ontworpen om de prestaties te verbeteren voor ontwikkelingsbehoeften. Het voordeel zal van pas komen wanneer intensieve berekeningsfuncties vereist zijn.
Voortbouwend op onze uitgebreide ervaring met het bouwen van autopiloten in de afgelopen jaren, hebben we een nieuw trillingsabsorptiesysteem geïmplementeerd in het mechanische ontwerp van de hardware en een geïntegreerde IMU-verwarmer voor temperatuurregeling van sensoren. Durandal is vooraf geïnstalleerd met PX4 en wordt ook ondersteund door andere vluchtparameters zoals Ardupilot.
2.PM02 is een eenvoudige manier om uw APM en Pix32 te voorzien van schone stroom vanuit een LiPo-batterij, evenals stroomverbruik- en batterijspanningsmetingen, allemaal via een 6-pos-kabel. De aan boord aanwezige schakelende regulator levert 5,2V en maximaal 3A vanuit een LiPo-batterij met maximaal 12S. De Power Module wordt volledig geassembleerd geleverd met XT60-connectoren en is omhuld met krimpkous voor bescherming.
De Power Module is ontworpen om APM, Pix32, een RC-ontvanger en APM-accessoires (GPS, radio) van stroom te voorzien. Het is niet ontworpen om servomotoren van stroom te voorzien. Gebruik de ESC/BEC van uw vliegtuig hiervoor. De GH-terminal is ook compatibel met zowel Pix32, Pixhawk4, Pixhawk4 Mini als Durandal.
Durandal Vluchtcontroller Specificatie:
Hoofd FMU-processor: STM32H743
32-bits Arm® Cortex®-M7, 480 MHz, 2MB geheugen, 1MB RAM
IO-processor: STM32F100
32 Bit Arm ® Cortex®-M3, 24MHz, 8KB SRAM
Aan boord sensoren
Accel/Gyro: ICM-20689
Accel / Gyro: BMI088
Mag: IST8310
Barometer: MS5611
GPS: ublox Neo-M8N GPS/GLONASS ontvanger; geïntegreerde magnetometer IST8310
seriële poort toewijzing:
SERIAL0 -> USB
SERIAL1 -> UART2 (Telem1)
SERIAL2 -> UART3 (Telem2)
SERIAL3 -> UART1 (GPS)
SERIAL4 -> UART4 (Telem4 I2CB)
SERIAL5 -> UART6 (Telem3)
SERIAL6 -> UART7 (reserve, debug)
Elektrische gegevens
Spanningsclassificaties:
Uitvoer voedingsmodule: 4.9~5.5V
Maximaal ingangsvoltage: 6V
Maximale stroomdetectie: 120A
USB-voedingsspanning: 4,75-5,25V
Servo Rail Ingang: 0~36V
Mechanische gegevens:
Afmetingen: 80*45*20.5mm
Gewicht: 68.8g
PM02 V3 specificatie Power Module:
UBEC ingangsspanning: 7-51v (2-12s LiPo)
Nominale stroom: 60A
Max stroom: 120A (<60S)
Maximale stroomdetectie: 120A
Ondersteunt 12S batterij
Spannings- en stroommeting geconfigureerd voor 3.3V ADC
Schakelende regulator produceert 5,2V en maximaal 3A
Gewicht: 20g
Laat de PM02 de hoeveelheid elektrische lading van uw batterij zien
Missie Planner installatie:
1. Sluit PM02 aan op de batterij en sluit het ook via USB aan op Mission Planner.
2. Klik op 'INITIAL SETUP' en ga naar het menu 'Batterijmonitor'.
3. Maak 'Monito' tot 'Analoge Spanning en Stroom'.
4.Maak van "Sensor" "9: Holybro Pixhawk4 PM".
5. Maak van 'HW Ver: 'De Cube of Pixhawk' (pixhawk4, pixhawk4mini, pix32v5, pix32)'※
Laat dit leeg (Durandal)
7. Voer '18,182' in in de spanningsdeler (Berekend).
Voer '36.364' in voor 'Amperes per volt'.
9.Ontkoppel het en sluit het opnieuw aan om de instelling te voltooien. ("Gemeten accuspanning" geeft de huidige hoeveelheid elektrische lading van de batterij aan.)
Pakket inbegrepen:
1x Durandal Flight Controller
1x PM02 V3 Voedingsmodule